
2023年に入り、関東大手民鉄の一部の事業者から相次いで無線式列車制御(以下、CBTC:Communications-Based Train Control)システム導入に向けた動きが公表されました。これらの発表資料では「踏切制御の高度化」に触れられていることが共通項です。これはCBTCシステム導入により得られる一般的なメリットなのですが、具体的にどういうことなのか、既存の踏切制御と比較しながら深掘りします。
1.はじめに
2023年1月に西武鉄道が2030年代に西武線全線への展開を視野に西武多摩川線でCBTCの実証試験を始めることを、2023年3月に東京メトロと東急電鉄が2028年度以降に東京メトロ半蔵門線と東急田園都市線、東急大井町線にCBTCを導入することをそれぞれ発表しました。
これら発表資料における解説で共通していたのが踏切制御の高度化に関する言及です。
“CBTCシステムでは、列車位置と速度を常時把握することにより、列車ごとに踏切の鳴動開始のタイミングを調整することができるため、これまで以上に踏切の遮断時間を最適化することが可能になります。”
2023年1月18日発表「西武線全線に無線式列車制御システム導入を目指し、多摩川線で無線式列車制御(CBTC)システムの実証試験を実施します」
“東急電鉄では、踏切制御を高度化し、列車速度に応じて踏切の警報開始地点を可変することにより、特に列車が遅延し低速度での運転時に踏切遮断時間の改善も見込まれることから、大井町線においてもCBTCシステムを導入し、2031年度に稼動する予定です。”
2023年3月23日発表「相互直通運転を行っている東急田園都市線・東京メトロ半蔵門線の信号保安システムを2028年度に同一の無線式列車制御システムに更新します~列車の遅延をより早く解消し、運行の安定性向上に取り組みます~」
これらのメリットを深く理解するために、まず既存の踏切制御を振り返ります。
2.既存の踏切制御
2.1 踏切制御の方法
従来使われてきた踏切制御の方法は2つの手法に大別されます。
1つは点制御式と呼ばれるもので、「始動点」を列車が通過したら踏切警報を開始し、「終動点」を列車が通過したら踏切警報を停止するものです。この方式はJRや一部の鉄道事業者で使われています。
もう1つは連続閉電路式と呼ばれるもので、踏切制御用の軌道回路を重畳するなどして、送信器と受信器の間に列車が在線していると踏切警報をするというものです。この方式は民鉄を中心に使われています。
-
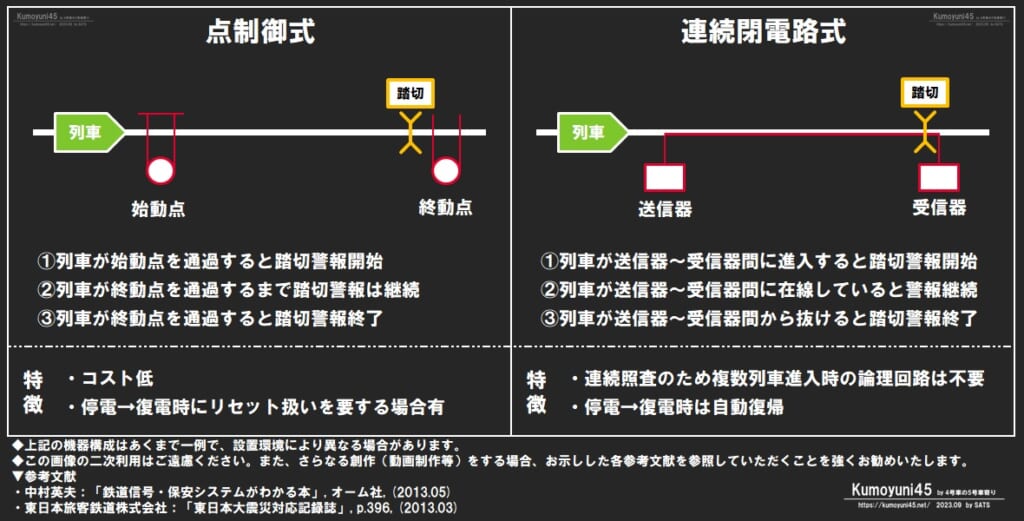
- 既存の踏切制御手法
このように、従来の踏切制御では地上設備の設計・設備方法により踏切警報を始める場所(以下、制御点)が予め固定されているのです。
2.2 列車選別装置
国土交通省から出されている「鉄道に関する技術上の基準を定める省令の解釈基準」では、下記のような条項が存在します。
“(6) 列車及び車両ごとの警報の開始から到達までの時間は、当該列車等の速度等により大きく異なるものでないこと。”
※国土交通省「鉄道に関する技術上の基準を定める省令の解釈基準」, p.76, 第3節第62条第4項第6号
(国土交通省:鉄道の技術基準の整備)
異なる列車種別の列車が混在して走る路線の場合、駅近くの踏切ではその駅を通過する列車と停車する列車の間で速度差が大きく、低速走行する停車列車の方が通過列車に比べて踏切の遮断時間が長くなってしまいます。この解釈基準では、そうした速度差に起因する時間差を極力なくすことを促しているといえます。
この時間差を低減するために、特に民鉄で発達したのが列車選別装置です。これは、接近列車の列車種別から駅の通過・停車を判別して、複数設けた制御点の中から適した制御点を選び踏切を制御する装置です。駅近くの列車進出側にある踏切では、その駅に停車する列車は駅に停車してから踏切に接近してくるので、より踏切に近づいた場所に制御点を設ければ遮断時間を通過列車と同程度に抑えることができます。条件を仮定したうえで、簡単な計算で得られた通過・停車列車に対する制御点位置の差異を下図に示します。
-
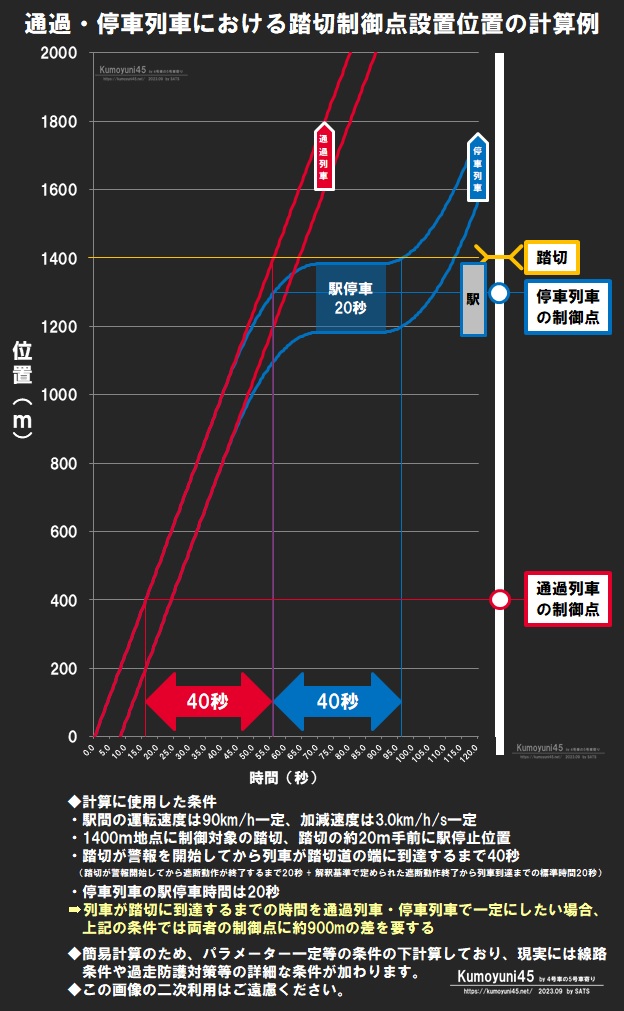
- 通過・停車列車における踏切制御点設置位置の計算例
2.3 残る課題
駅の通過・停車による遮断時間の差異を低減することは従来方式の踏切制御手法で実現できますが、制御点は固定されたままで、地上設備の設備点数も多くなります。
列車運行への追従性も課題といえます。踏切の制御点は運転曲線などを基に警報時間を満たす位置に設置されます。しかし、何らかの事情(先行列車に接近、天候や工事等による徐行等)で定められた運転曲線から外れて低速走行する場合、踏切に到達するまで設計した時間よりも多くの時間が掛かり、踏切を通行する人や自動車等をより多くの時間待たせてしまいます。
さらに別の観点では、踏切を含む区間の運転曲線の見直し(速度向上等)を行う場合、制御点を含めた地上設備の改修が必要となり、時間・労力・コストを要します。
3.CBTCにおける踏切制御
3.1 CBTCにおける踏切制御
本稿で紹介するのは、常用する列車位置検知手法に軌道回路を使用せず、列車在線範囲を連続的に認識しうる都市鉄道向けCBTC(日本国内最初の開発事例CARATでいう車上-現場方式*3)を前提にした踏切制御の概要です。
CBTCでは列車自らの位置と速度を認識しています。この情報を利用し、車上装置は現在位置とデータベースに登録された踏切位置を比較し踏切に到達するまでの時間を計算し、踏切に接近したら地上側に警報開始を要求します。車上側は踏切防護パターンを発生させて、警報開始前の踏切に列車が進入することを防ぎます。地上側から踏切が遮断完了したことを受信すると踏切防護パターンは消去され踏切を通過できるようになり、踏切進出後はその列車の在線範囲が踏切を抜けることで踏切警報が止まります(警報停止を地上側に要求する)。詳細な列車位置の連続的把握と地上・車上間の双方向通信という特徴を生かした、CBTCシステムならではの制御手法です。
また、踏切制御をする現場機器箱やバックアップ設備等は引き続き必要ですが、制御点などの設備点数やケーブル延長を削減でき、従来よりも設備をスリム化できることもメリットです。
以下にJR東日本のATACSにおける踏切制御機能の概要を示します。
-
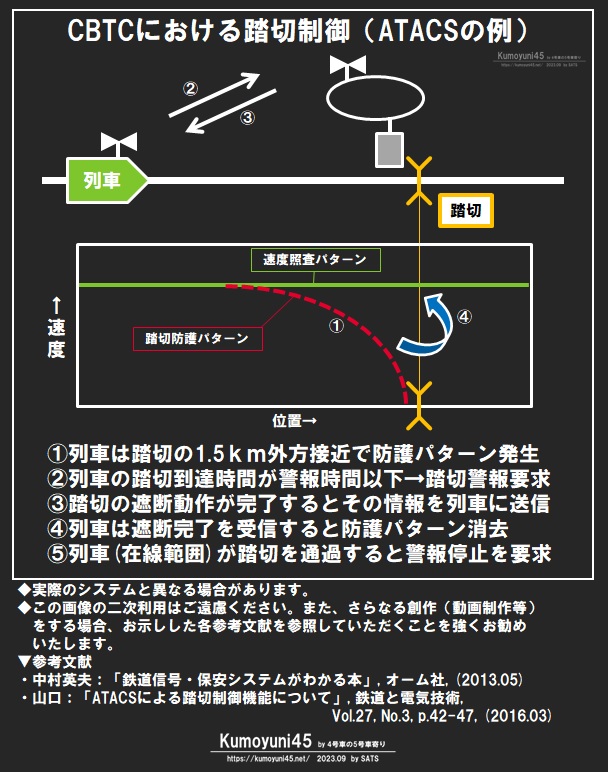
- CBTCにおける踏切制御(ATACSの例)
3.2 可変する制御点
ここで重要なのは「踏切に接近したら地上側に警報開始を要求」するという点です。
踏切に到達するまでの時間はそのときの列車速度によって変化します。前述のとおり、車上装置は自列車の位置と速度を認識して踏切に到達するまでの時間を計算しますから、地上側に警報開始を要求する場所を列車速度に応じて変えることができるのです。この仕組みは、先に述べた従来方式の制御点が固定されていたことに起因する課題を解消するメリットで、遮断時間の短縮・平準化のほか運転速度の見直しが容易になるといった副次的な効果ももたらします。
この概念を下図に示します。より具体的な例は参考文献*5で確認できます。
-
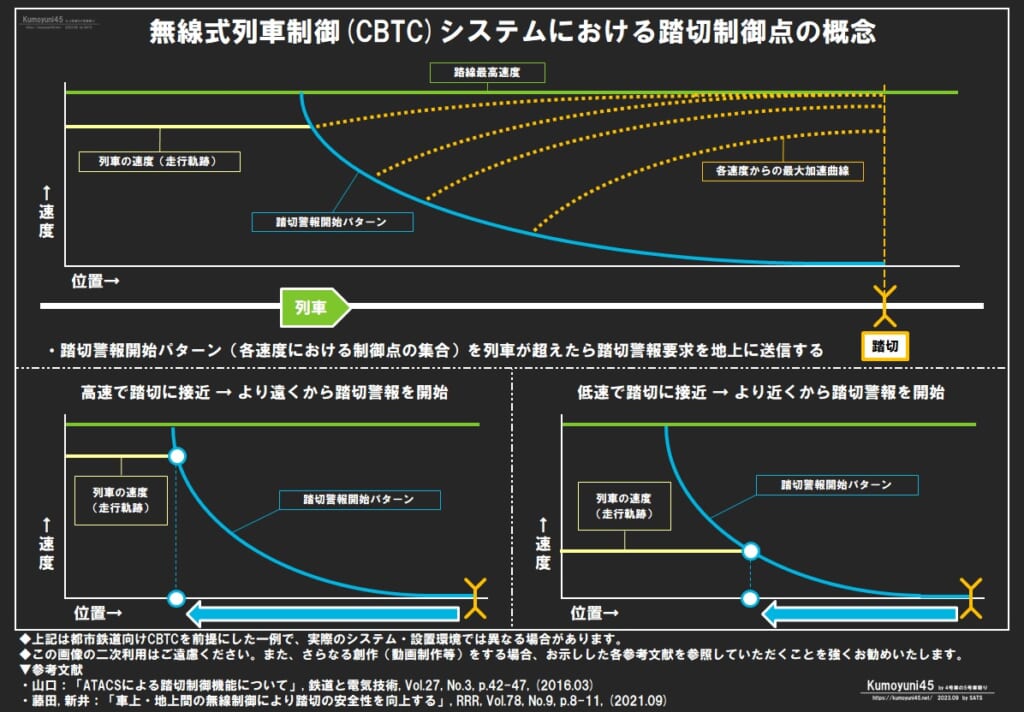
- 無線式列車制御(CBTC)システムにおける踏切制御点の概念
JR東日本の仙石線ATACSでは2014年からATACSによる踏切制御機能を導入していますが、上記のような適切なタイミングで踏切警報要求が行えたことで、導入区間の全踏切で平均して20%程度の警報時間(遮断時間)が減少したとしています*4。(ただし、状況によって警報時間が数秒程度長くなる場合があるとしています)
3.3 発表資料間の共通項
改めて西武と東京メトロ・東急の発表資料を見返すと、いずれの資料も列車の位置・速度に応じて踏切遮断時間を減少させることを謳っています。これら2つのシステムは発表資料の内容から異なる機器構成であることが予測できますが、得られるメリットについては共通しています。これは3.2項でご説明した内容と同等です。つまり、都市鉄道向けCBTCにおける踏切制御を実現する際の普遍的なメリットを示していると捉えることができ、本稿執筆時点の情報からは、個々のシステムが有する特異な機能ではないことが窺えます。
4.おわりに
本稿では、従来の踏切制御方式とCBTCにおける踏切制御を簡単に紹介したうえで、異なる鉄道事業者が最近発表した資料における内容の共通項を確認しました。列車位置検知の方法が抜本的に変わるCBTCでは、列車速度に応じて踏切制御点が可変することで、踏切遮断時間の短縮などの効果が得られます。
CBTCに関しては趣味界でも理解が進む途上とみられます。こうした状況下で新システムの一般的な仕組みやメリットを整理することは重要と考えます。今後同種の発表が鉄道事業者からあった際に、本稿がその内容を読み解く足掛かりの一つになれば幸いです。
◇◇
本稿は平易な説明を重視するとともに文量および保安上の観点から割愛している事柄があります。鉄道信号方面の造詣が深い方におかれましてはその点ご容赦ください。また、お気づきの点やフィードバックがございましたら本稿のコメント欄にお寄せください。
※本稿各画像の二次利用はご遠慮ください。また、さらなる創作(動画制作等)をなさる場合、お示しした各参考文献を参照していただくことを強くお勧めいたします。
参考文献
*1.中村英夫:「鉄道信号・保安システムがわかる本」, オーム社, (2013.05)
*2.東日本旅客鉄道株式会社:「東日本大震災対応記録誌」, p.396, (2013.03) https://id.ndl.go.jp/bib/024434129 (国立国会図書館オンラインURL)
*3.平尾, 西堀, 南, 長谷川:「次世代運転制御システム(CARAT)における踏切制御」, 鉄道総研報告, Vol.7, No.5, p.25-31, (1993.05) https://id.ndl.go.jp/digimeta/3312753 (国立国会図書館オンラインURL)
*4.山口:「ATACSによる踏切制御機能について」, 鉄道と電気技術, Vol.27, No.3, p.42-47, (2016.03) https://id.ndl.go.jp/bib/027142519 (国立国会図書館オンラインURL)
*5.藤田, 新井:「車上・地上間の無線制御により踏切の安全性を向上する」, RRR, Vol.78, No.9, p.8-11, (2021.09) https://www.rtri.or.jp/publish/rrr/2021/rrr09.html
関連記事
関東大手民鉄・地下鉄の保安装置更新時期①大手民鉄編
関東大手民鉄・地下鉄の保安装置更新時期②地下鉄編
関東大手民鉄・地下鉄の保安装置更新時期③相互直通編
関東大手民鉄・地下鉄の保安装置更新時期④設備動向編
関東大手民鉄・地下鉄の保安装置更新時期⑤車両動向編


コメント